 Demining drone
Demining drone
Simulation
After the implementation of the project, the next part is the test phase and simulation of the prototype. The aim is to verify the correct functioning of the whole system.
Setup
Firstly we have to mount the stipboard, the antenna NRF24 and the GPS module on the drone. The drone used for the simulation is the Potensic T25.



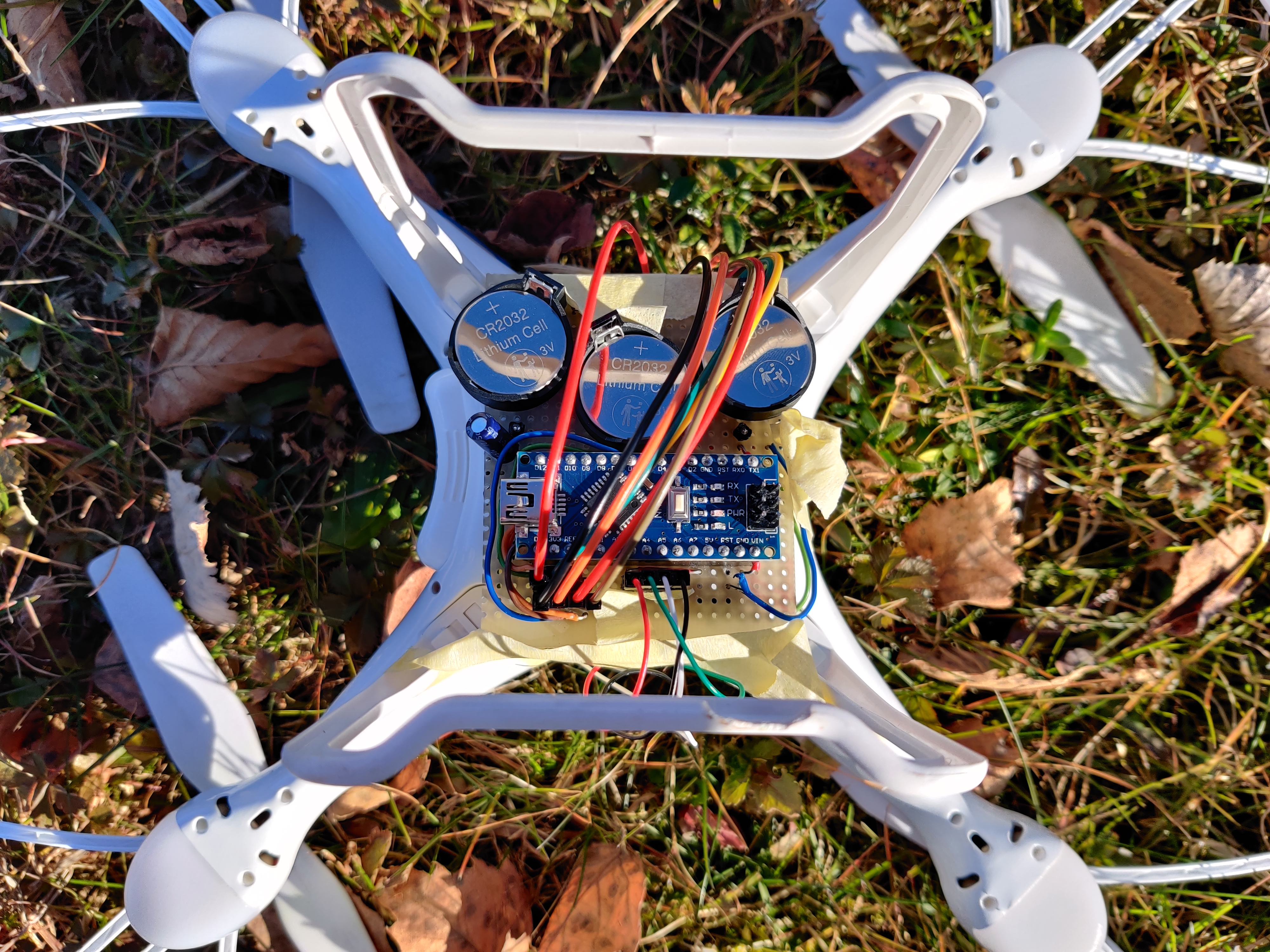
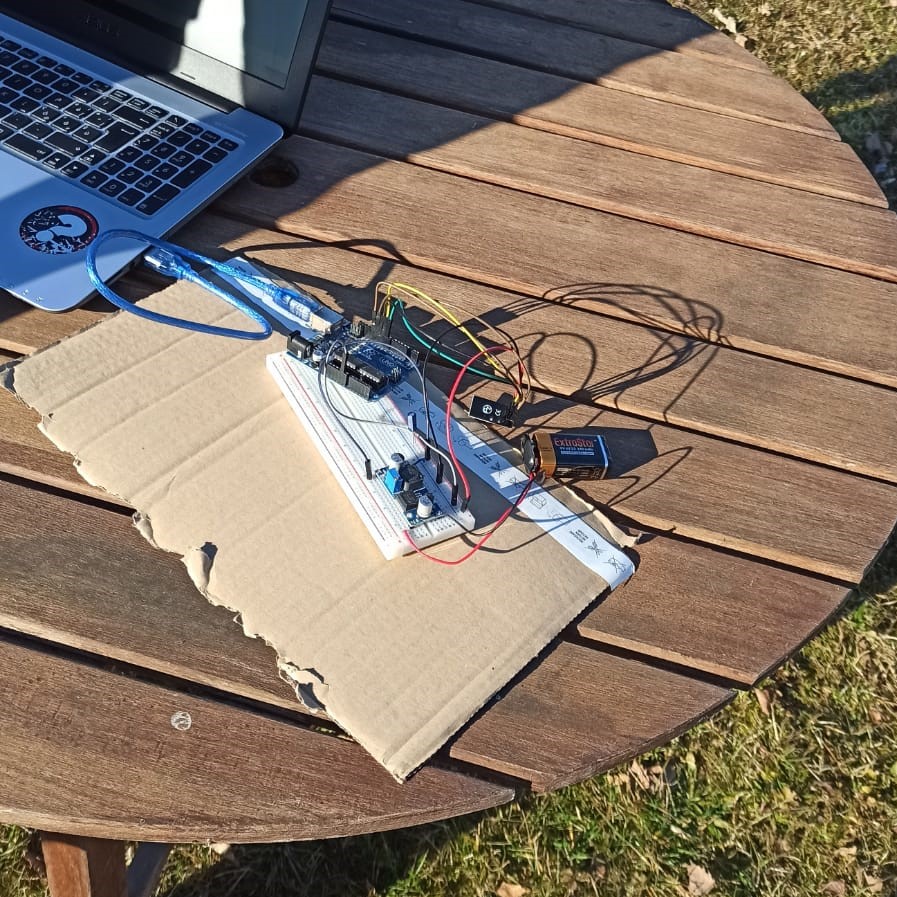
Then we have to load the program trasmettitore.ino on the Arduino Nano placed on the drone and the program ricevitore.ino on the Arduino Uno connected to the PC. On the user side, the links of the receiver must be done like that:
Writing the following line in the command prompt inside the folder where the Python program is placed, the program starts and the map is opened.
python script_python.pyAfter the flight of the drone over the field that we want to scan, the results of the acquisition are saved in a file named received_data.csv that during the last test has the following content:
latitude,longitude,probability
46.137268,13.321054,0.5458000000000001
46.137351,13.321072,0.40540000000000004
46.13742,13.321077,0.6864000000000001
46.137474,13.321054,0.5792
46.137542,13.321091,0.511
46.137607,13.321136,0.38720000000000004
46.137699,13.321167,0.4271999999999999
46.137683,13.321251,0.4168
46.137619,13.321259,0.5105999999999999
46.137565,13.321245,0.5773999999999999
46.137504,13.321228,0.5264
46.137435,13.321205,0.44060000000000005
46.137344,13.321184,0.5858
46.13729,13.321169,0.6774
46.137321,13.321267,0.5702
46.137378,13.321269,0.6529999999999999
46.137481,13.321306,0.3556
Obviously, the data of probability is purely random, the real value is given by the probability of finding a mine using a ultrasonic sensor.
Polytechnic department of engineering and architecture
Università degli Studi di Udine
- © Untitled Inc. All rights reserved.
- Design: HTML5 UP