
PROGETTAZIONE DI UN DISPOSITIVO DI INSEGUIMENTO VIDEO
Corso: Laboratorio didattico di Ingegneria dell'Informazione, Prof. Riccardo Bernardini, A.A. 2014/15
Studenti: Mattia Dal Ben, Manuel Guglielmini
Corso: Laboratorio didattico di Ingegneria dell'Informazione, Prof. Riccardo Bernardini, A.A. 2014/15
Studenti: Mattia Dal Ben, Manuel Guglielmini
Il test della versione finale del dispositivo è stato effettuato nell'aula 51 del Polo Scientifico Rizzi, a metà mattinata e con le luci dell'aula accese. Il dispositivo è stato collocato sopra ad un banco a circa 2 metri di distanza dalla lavagna. Le immagini di figura 9 illustrano il piano di appoggio e l'ambiente di test.

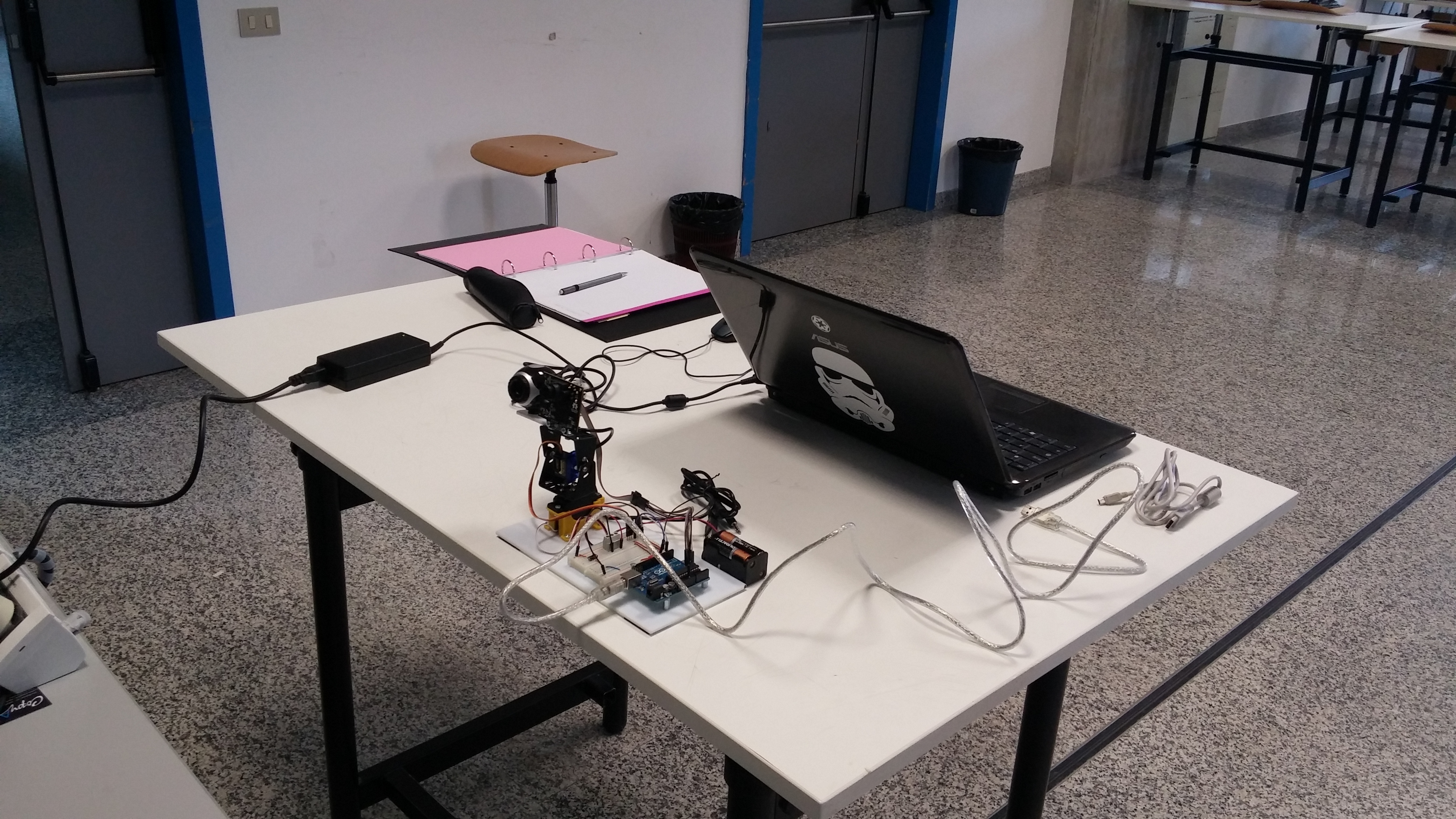


Figura 9: piano d'appoggio e ambiente di test
In seguito al posizionamento dell'oggetto la Pixycam è stata addestrata con l'opportuno procedimento per riconoscere i marcatori (in un primo momento il marcatore a due colori e successivamente quello monocolore) e si è poi passati alla calibrazione, step necessario per determinare i parametri del sistema di controllo come descritto nell'apposita sezione, ottenendo i parametri riportati in figura 10.
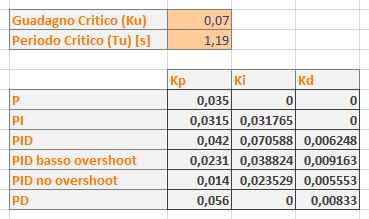
Figura 10: calcolo parametri secondo regola di Ziegler-Nichols
Sono stati quindi effettuati numerosi test, utilizzando tutti i metodi di controllo presi in considerazione (proporzionale, proporzionale-integrale, proporzionale-derivativo e proporzionale-integrale-derivativo per il movimento lungo la direzione orizzontale e proporzionale per la direzione verticale) con entrambi i marcatori; è inoltre stato testato l'inseguimento in un range di 180° con il marcatore singolo.
Il tutto è stato documentato con riprese video, sia tramite registrazione dell'input della webcam stessa che con ripresa esterna dei movimenti del dispositivo. Di seguito sono riportati tutti i video, suddivisi opportunamente e commentati.
Com'è possibile osservare dai video, i risultati migliori si ottengono con il controllo proporzionale e con quello proporzionale-integrativo-derivativo. Nel caso di controllo proporzionale derivativo e integrativo emergono invece problemi di instabilità, specialmente nel secondo caso, che portano la camera a compiere oscillazioni molto ampie lungo la direzione orizzontale.
I filmati che seguono sono stati postprocessati con l'algoritmo di stabilizzazione di YouTube, che ha reso il video più stabile e fluido: ciò indica che è possibile elaborare ulteriormente le riprese per migliorarne la qualità.
Anche in questo caso i controlli migliori risultano essere il proporzionale e il proporzionale-integrale-derivativo, mentre per i due restanti permane il problema delle oscillazioni. A differenza del caso precedente è possibile notare una maggior oscillazione del video, causata delle dimensioni maggiori del marcatore per i motivi già esternati nella sezione relativa.
In questo tipo di test si è voluto verificare il funzionamento dell'inseguimento sul range completo che il dispositivo è in grado di coprire. Come nei casi precedenti i risultati migliori sono forniti da controllo proporzionale e proporzionale-integrale-derivativo, mentre le oscillazioni permangono per gli altri due tipi di controllo.