Sviluppo Hardware
Questa fase progettuale descrive l'interfacciamento hardware e la scelta della componentistica adottata.
- Acquisizione Video. L'acquisizione viene fatta attraverso una comune webcam commerciale, con una qualità dell'immagine sufficiente ad ottenere un buon compromesso in termini di risoluzione ed tempi di elaborazione CPU.
- Supporto mobile. Il movimento viene ottenuto attraverso dei servo motori (uno per il movimento verticale ed uno per quello orizzontale) montati su un apposito supporto che consenta il fissaggio del dispositivo ed il movimento fluido della telecamera.
- Elaborazione grafica. L'elaborazione grafica, quindi il corpo principale della potenza di calcolo necessaria, viene eseguita da un software dotato di interfaccia grafica eseguito su un computer portatile dotato di distribuzione Linux.
- Controllo servo motori. La gestione dei servo proviene da una scheda Arduino appositamente programmata per interfacciarsi con il software in esecuzione sul computer e tradurre i comandi in segnali di avvio dei motori. Essa si occupa anche del pilotaggio dei LED montati sul supporto.
- LED. Sono previsti dei LED di segnalazione di eventi:
- LED verde: Dispositivo acceso e funzionante.
- LED giallo: Un servomotore ha raggiunto la fine della sua corsa. Comporta una possibile perdita del tracciamento.
- LED rosso: può essere acceso solo contemporaneamente agli altri due LED ed indica che i servomotori vengono riportati alla loro posizione predefinita. Mentre il LED rosso è acceso, la scheda Arduino non è in grado di ricevere nuovi messaggi da parte del software
Componenti utilizzati
La seguente tabella mostra i componenti adoperati nella realizzazione del prototipo.
| Componente | Immagine | Descrizione - Link |
|---|---|---|
WebCam |
 |
RB-See-295 |
| 2x Servo motore |  |
SG90Servo |
| Supporto |  |
Pan/Tilt per servo 9 grammi |
| Arduino |  |
Arduino Due |
| 3x Diodo LED |  |
Forniti in laboratorio |
| 3x Resistore |  |
Forniti in laboratorio |
Collegamenti e circuiti
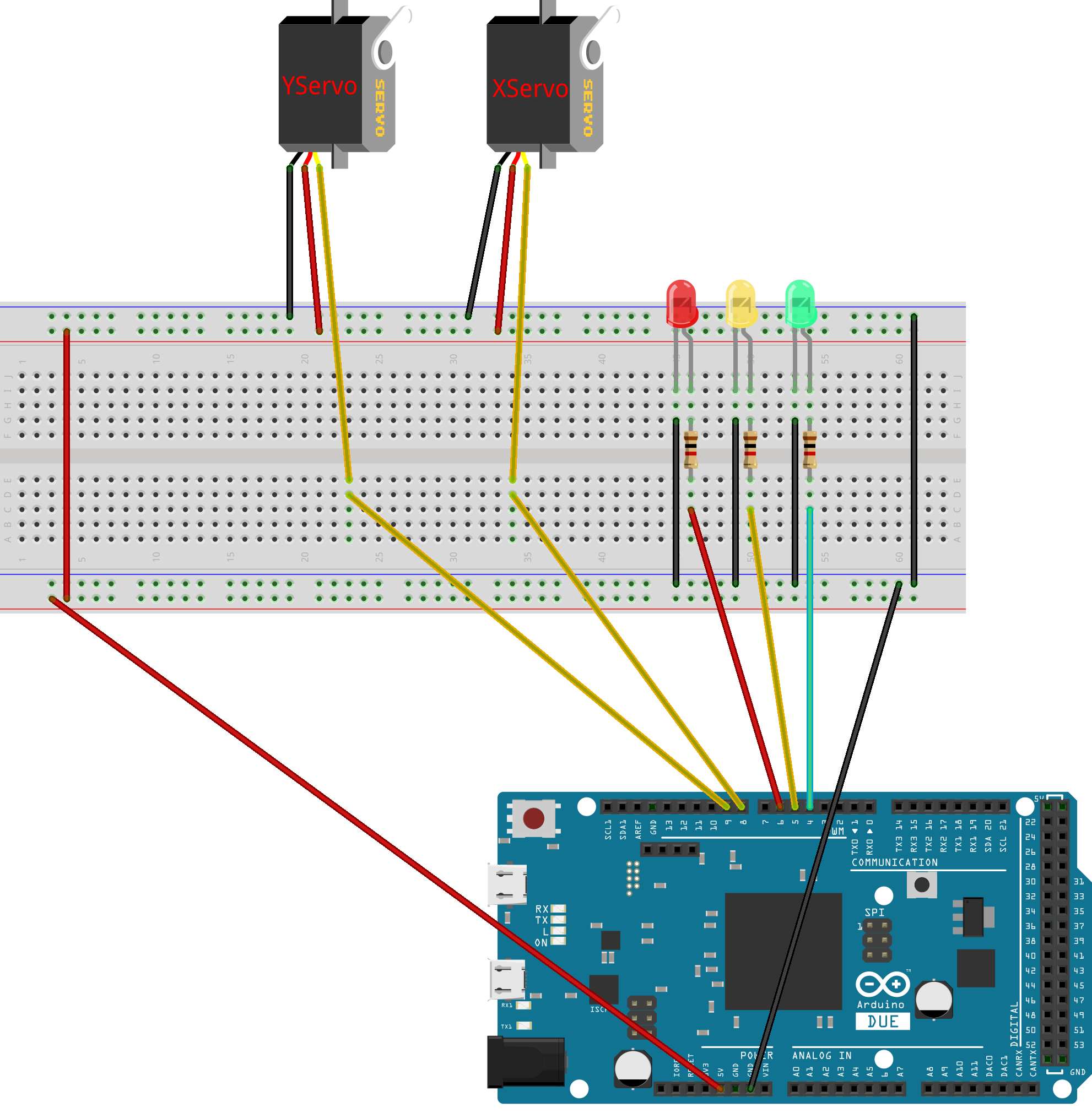
Il portatile viene connesso all'Arduino attraverso un cavo USB di tipo micro-B sulla "programming port" di Arduino Due. La Webcam viene collegata ancora al PC portatile secondo un normale cavo USB. Il collegamento dei diodi LED invece, richiede l'utilizzo di un circuito stampato per il pilotaggio. Il tutto è alimentato dal calcolatore.
Nella realizzazione del prototipo è stata utilizzata una Breadboard. Il circuito costruito prevede soltanto la serie resistore-LED per limitare la corrente di ciascun diodo.
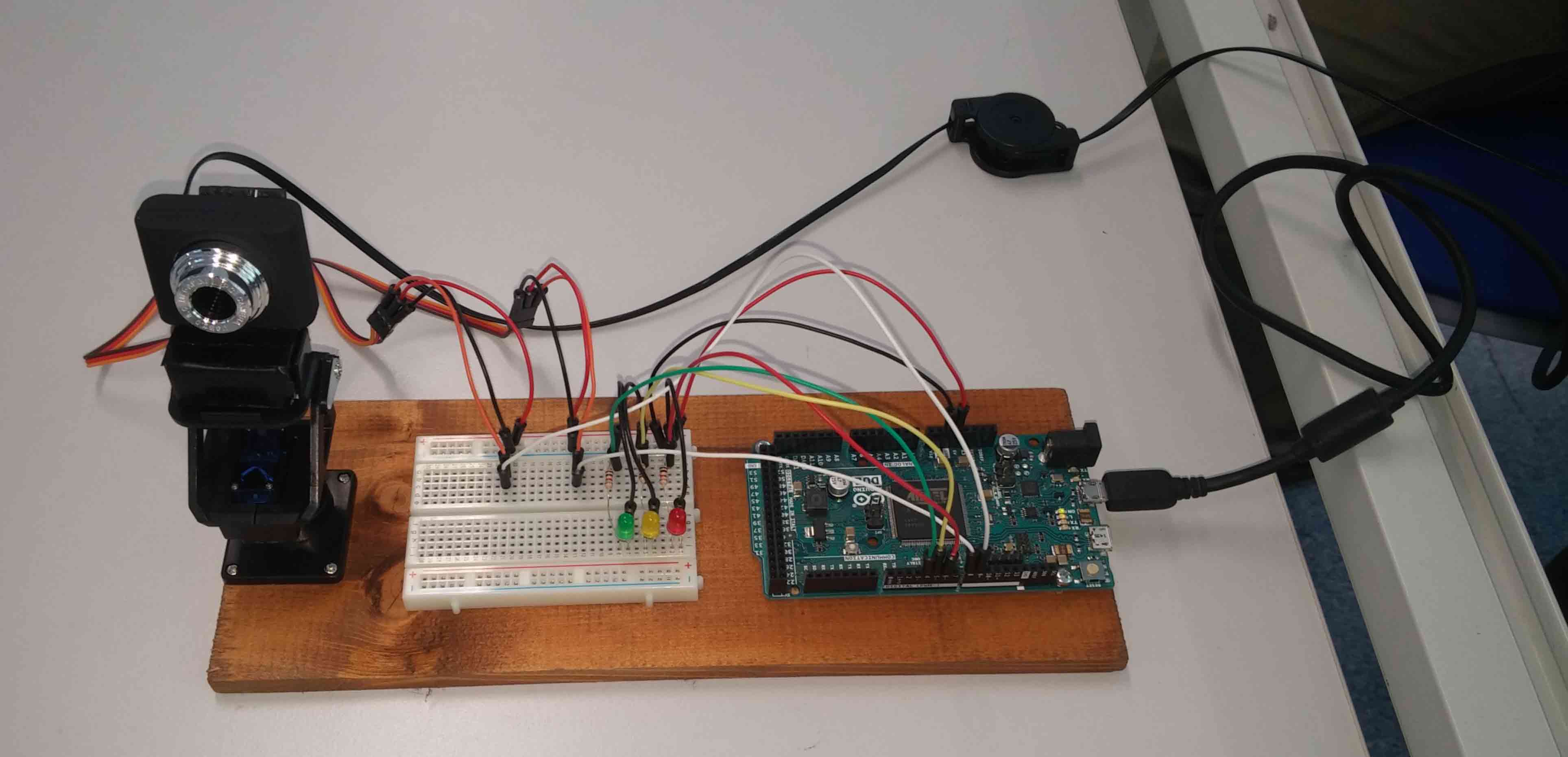
Prototipo finale
L'ultimo passaggio si occupa di collegare assieme tutti compomenti. La seguente immagine ne mostra il risultato ottenuto per la realizzazione del prototipo.