1. Misure di impedenza
Il metodo pensato per ricavare il modulo e la fase di un carico è quello di usare il concetto di modulazione in quadratura rappresentata in figura due:
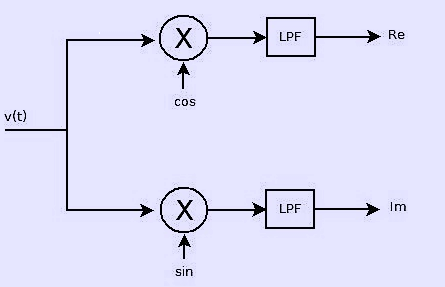
Ipotizzando di alimentare il DUT con un segnale cosinusoidale, come quello rappresentato nella formula uno, il carico risponderà con una corrente di tipo cosinusoidale con la stessa frequenza ma con una ampiezza determinata dal tipo di carico e con un certo sfasamento come rappresentato nella formula due:
(1) 
(2) 
Se ora consideriamo di percorrere il ramo superiore dello schema a blocchi rappresentato in figura due, possiamo ricavare la parte reale del segnale con la formula tre:
(3) 
Si può notare come la moltiplicazione abbia generato un segnale a 2fo e un segnale in continua proporzionale al coseno dell’angolo ɸ, successivamente filtrando il segnale con un filtro passa basso si può estrarre una tensione continua proporzionale alla parte reale del fasore associato.
(4) 
Analogamente se il segnale attraversa il ramo inferiore del modulatore in quadratura si può dimostrare con una relazione del tutto analoga a quella rappresentata nella formula tre che si può ricavare la parte immaginaria del fasore.
(5) 
Il principale vantaggio di questo metodo è che le informazioni legate alla parte reale e immaginaria del segnale vengono convertite in una tensione continua permettendo così l’uso di convertitori analogico digitali con basse frequenze di campionamento e meno costosi.
Gli svantaggi sono due, il primo è che al fine di riuscire a ricavare la parte immaginaria del segnale è necessario avere a disposizione due segnali sinusoidali in quadratura tra di loro cosa che non è sempre facile da ottenere. Il secondo svantaggio di questa tecnica è la necessità di utilizzare dei mixer analogici che devono garantire una buona linearità nel range di misura scelto.
2. Connessioni
Generalmente gli impedenzimetri sono provvisti di quattro connettori BNC, due di questi terminali
sono quelli in cui fluisce la corrente, chiamati He high current e Le low current, gli altri due terminali sono invece quelli che portano all’impedenzimetro la tensione presente ai capi del DUT,
e sono chiamati Ho high voltage e Lv e low voltage. Esistono diversi schemi di connessione fra
l’impedenzimetro ed il DUT ognuno con dei pregi e dei difetti.
2.1 Configurazione a due terminali
Questa configurazione, figura 3, è il modo più semplice per collegare il DUT all’impedenzimetro ma, presenta diverse fonti di errore. Infatti quando si effettuano misure di resistenza in corrente alternata non ci sono più solo le resistenze associate ai fili di collegamento, ma anche induttanze e capacità parassite le quali possono compromettere la misura. A causa di questi elementi il range di misura è limitato fra 1000 e 10kΩ.
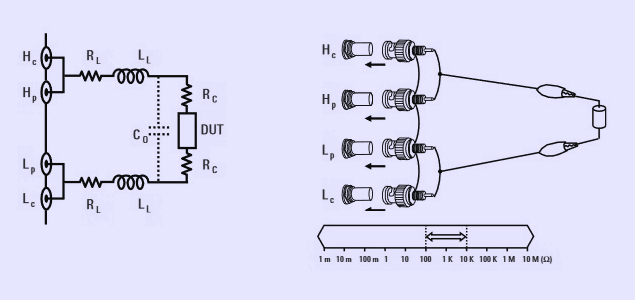
2.2 Configurazioni a quattro terminali
Separando i fili che misurano la tensione da quelli che misurano la corrente si possono ridurre gli effetti delle resistenze e induttanze parassite dei cavi di collegamento. Al fine però di riuscire a eliminare anche gli effetti delle capacità parassite e riuscire così a misurare anche impedenze elevate è necessario utilizzare cavi schermati. Se le schermature dei cavi vengono connesse fra loro in prossimità del carico allora la corrente per chiudere il suo percorso è costretta a passare attraverso il conduttore esterno dei cavi He e Le. Il flusso magnetico generato dai conduttori interni è annullato da quello creato da quelli esterni riducendo quindi l’accoppiamento tra i cavi. Con questa configurazione mostrata in figura quattro e comunemente detta a quattro terminali risulta possibile misurare impedenze di valore inferiore ad 1mΩ.
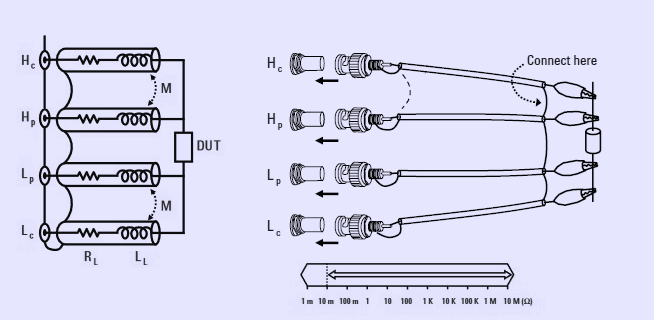
2.3 Compensazioni
Il fatto di utilizzare dei cavi per collegare l’impedenzimetro al DUT introduce degli errori nella misura, al fine di ridurre questi errori si fa quella che viene chiamata con il nome di compensazione.
Essa consiste nel ridurre l’effetto delle fonti di errore esistenti tra l’impedenza incognita ed il piano di calibrazione dello strumento. La compensazione non è comunque in grado di annullare sempre l’errore della misura, ma se eseguita correttamente è in grado di migliorare l’effettiva accurattezza di una misurazione. Esistono principalmente tre tipi di compensazione:
– offset compensation
– open-short compensation
– open-short load compensation
La offset compensation viene utilizzata nel caso in cui la misura sia perturbata dagli effetti di un singolo componente; per esempio nel caso in cui esista una capacità parassita che va a porsi in parallelo al DUT, in questo caso per correggere la misura è sufficiente sottrarre il valore di questa ammettenza al valore letto dallo strumento, il valore della capacità viene determinato eseguendo una lettura dello strumento con i terminali lasciati aperti.
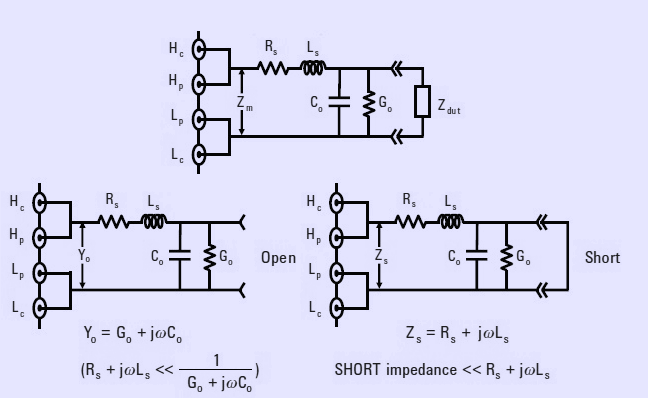
La open-short compensation è la compensazione più diffusa nei moderni impedenzimetri, essa si basa sul presupposto che quello che si trova tra il piano di calibrazione dello strumento ed il DUT sia modellizzabile tramite una circuito a parametri concentrati analogo a quello di figura 2.3. Al fine di determinare i parametri del circuito bisogna eseguire due misurazioni. La prima di esse viene eseguita lasciando i morsetti aperti e si riesce a ricavare il valore di Yo, mentre mediante la seconda misura che va a cortocircuitare i morsetti si può ricavare il valore dell’impedenza serie Zs, una volta noti questi parametri è possibile collegare il DUT e tramite l’equazione sei si è in grado di compensare il valore letto dallo strumento.
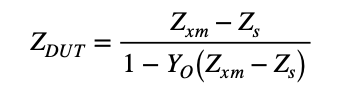
Dove:
- ZDUT: Impedenza da misurare
- ZXM: L’impedenza misurata
- Y0: Ammettenza misurata con i morsetti aperti
- ZS: Impedenza serie
3. Analisi del progetto
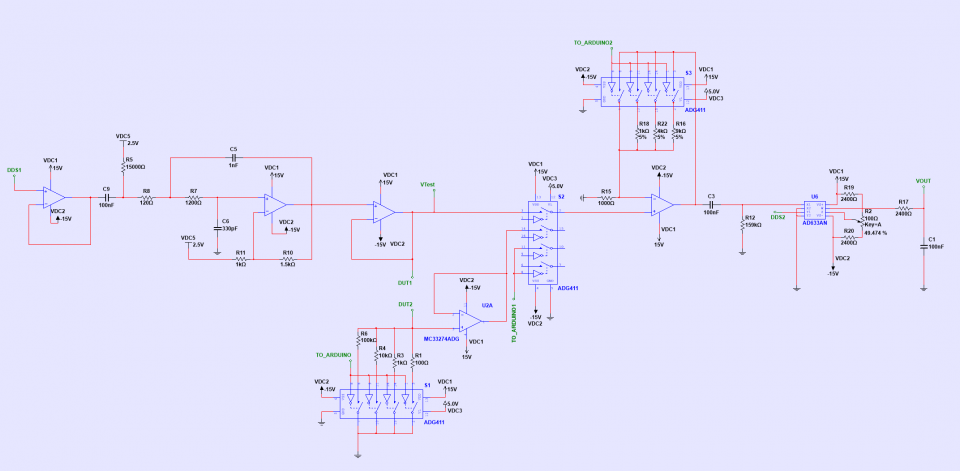
In questo paragrafo andremo ad analizzare in maniera dettagliata le varie parti del circuito che costituiscono l’impedenzimetro. In prima analisi verrà mostrato uno schema a blocchi dell’intero circuito che è riportato in Figura 3.1 e successivamente verrà spiegato in maniera più dettagliata il funzionamento di ogni singolo blocco.
L’impedenzimetro realizzato è in grado di misurare impedenze ohmico-capacitive o ohmico-induttive su un intervallo di frequenze che va da 1KHz a 100KHz. Lo scopo ultimo è quello di realizzare un circuito con buone prestazioni ma allo stesso tempo con costi contenuti.
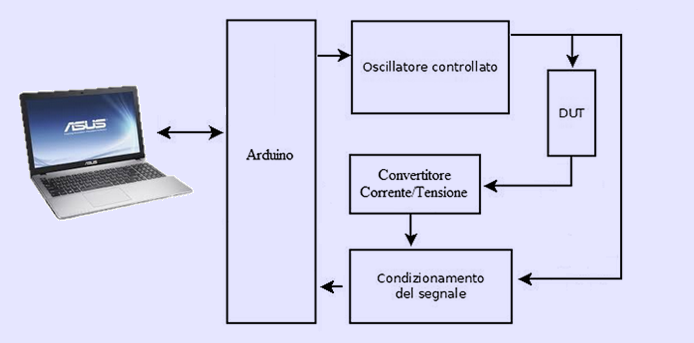
Come si può vedere dallo schema a blocchi di figura uno si possono individuare diverse unità all’interno del progetto:
- Una unità di calcolo/controllo in grado di comunicare con i vari circuiti del dispositivo e di interfacciarsi con il PC allo scopo di ricevere i comandi e di inviare i valori delle misurazioni.
- Un oscillatore a frequenza variabile in grado di generare un segnale di test da mandare al carico (anche detto Device Under Test o DUT). Per realizzare questo blocco si è pensato di utilizzare un Direct Digital Synthesis (DDS) in grado di generare delle sinusoidi alle varie frequenze.
- Un circuito di condizionamento ed elaborazione dei segnali di tensione e corrente provenienti dal DUT. L’idea di funzionamento di questo blocco come vedremo fra poco, sarà basata sull’utilizzo di un modulatore in quadratura.
3.1 Generatore di segnale
La generazione del segnale è stata realizzata utilizzando la tecnica della ‘Direct Digital Synthesis’ (DDS) che risulta molto comoda quando si vuole realizzare una variazione della fase e della frequenza del segnale in modo digitale.
La DDS è una tecnica in grado di generare segnali variabili partendo da un preciso e fissato segnale di clock. I principali vantaggi della DDS sono:
- Riuscire ad ottenre una risoluzione in frequenza dell’ordine dei mHz ed una traslazione di fase fase minore di un grado
- Elevata velocità nella variazione di frequenza e di fase del segnale, ed inoltre è totalmente controllabile in maniera digitale
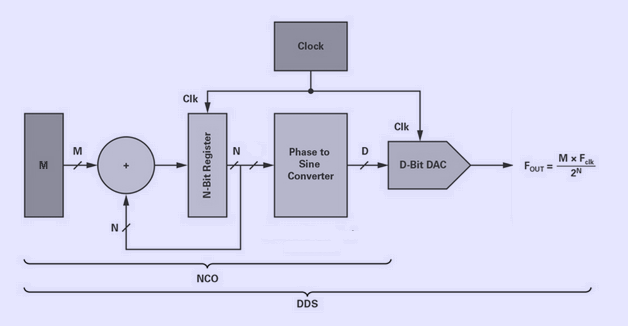
Un sistema DDS è composto sostanzialmente da tre componenti fondamentali
- Un oscillatore a controllo numerico che presenta un registro per la selezione della frequenza detto Tuning Word M, un accumulatore di fase a N bit. Il sistema DDS genererà una frequenza pari a:
- una ROM contente i dati della forma d’onda che i vuole realizzare.
- Un convertitore digitale analogico che sintetizza la forma d’onda.
In figura 3.2 viene riportato uno schema di principio del DDS:
Il componente utilizzato per questo progetto è l’AD9833 della Analog Devices. Il dispositivo è dotato di un clock di 25MHz e quindi è in grado di generare al massimo una frequenza di uscita di 12.5MHz. Il dispositivo dispone di due registri per la selezione della frequenza e della fase del segnale di uscita. Inoltre presenta un convertitore analogico digitale con una risoluzione di 10bit.
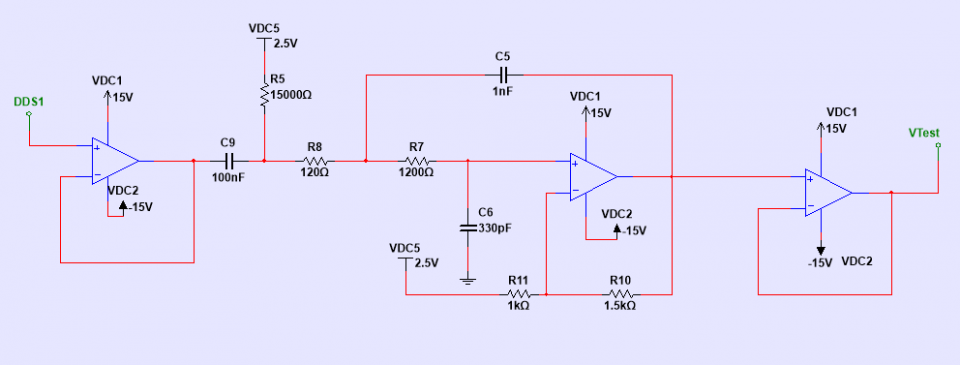
Il dispositivo genera un segnale di uscita che presenta un’escursione da 0V a 600mV con una componente continua di 2.5V nel caso in cui la resistenza di carico sia maggiore di 200Ω. Se si vuole generare un segnale di test con una tensione maggiore allora si ha la necessità di amplificare e filtrare il segnale con un filtro passa banda.
Per amplificare il segnale ai livelli voluti è possibile utilizzare il circuito in figura 3.3. Il
primo stadio è un operazionale in configurazione non invertente che funge da inseguitore di tensione dove in uscita è posto un filtro passa alto per traslare la componente continua a 2.5V. Inoltre è presente un filtro attivo passa basso di tipo Sallen-Key che amplifica il segnale a quattro Volt picco-picco.
3.2 Programmare l’AD9833
L’AD9833 per comunicare utilizza un bus di tipo SPI full-duplex sincrono in quanto, esso presenta una linea di clock che gestisce la trasmissione dei dati fra i vari dispositivi. I dispositivi che comunicano mediante SPI presentano un dispositivo detto master che genera il segnale di clock e controlla la comunicazione. Sono necessari quattro linee di segnali per una trasmissione basata su SPI:
- SCK o SCLK, è il segnale di clock che viene emesso dal master e può essere disabilitato quando non viene trasmesso alcun dato.
- SDI è la linea che porta il segnale di dati in ingresso al dispositivo
- SDO è la linea che trasmette i dati in uscita dal dispositivo
- CS segnale di controllo usato dal master per abilitare la comunicazione con il dispositivo
Le comunicazioni con l’AD9833 avvengono inviando due byte alla volta partendo dal byte più significativo. I registri in cui si può scrivere sono: il control register di quattordici bit, due registri per la selezione di frequenza (FREQ0 e FREQ1) e infine due registri per la selezione della fase del segnale di uscita (PHASE0 e PHASE1).
Vediamo per esempio come calcolare e impostare il valore della frequenza desiderata.
Per poter calcolare il valore da inserire nel registro adibito alla selezione della frequenza, detto tuning word, si può fare riferimento alla seguente formula:
Per impostare il valore di frequenza in uscita si devono effettuare tre scritture da 16bit. Nella prima scrittura è necessario settare il bit B28=1 in modo che il dispositivo si prepari alla ricezione del valore di frequenza. Nella seconda scrittura si scrivono i 14 bit meno significativi preceduti dai due bit D15 e D14, i quali servono per far capire al dispositivo se il valore va scritto del registro FREQ0 o FREQ1. Infine nel terzo passaggio vengono scritti i 14 bit piu significativi, sempre preceduti da i bit D15 e D14 opportunamente selezionati.
Ad esempio se dobbiamo scrivere il valore nel registro FREQ0:
Prima Scrittura:
| 0 | 0 | 1 | X | X | X | X | X | X | X | X | X | X | X | X | X |
| D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
Seconda scrittura:
| 0 | 1 | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB | LSB |
| D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
Terza scrittura:
| 0 | 1 | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB | MSB |
| D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
Invece per scrivere un valore di fase (12 bit) basterà una sola scrittura settando D15 e D14 a 1, e a seconda del valore che assume il bit B28, il valore verrà caricato nel registro PHASE0 o PHASE1.
3.3 Convertitore corrente Tensione
Per convertire la corrente sul DUT in una tensione proporzionale è stato realizzato mediante l’uso di operazionale un convertitore corrente-tensione non invertente. La figura 3.4 mostra il circuito in questione.
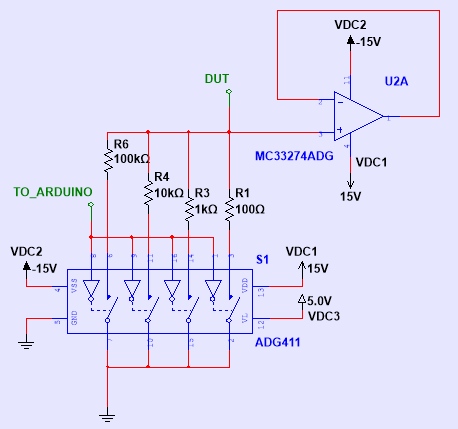
La tensione ai capi della resistenza nota è proporzionale alla corrente che scorre sul DUT essa viene prelevata da un’operazionale in configurazione di inseguitore di tensione la cui resistenza di ingresso ha un valore elevato in modo tale che la corrente assorbita dal piedino non invertente dell’operazionale sia abbastanza piccola e che non vada a perturbare la misura della tensione sulla resistenza di sense. A seconda del valore dell’impedenza incognita l’Arduino nano selezionerà il corretto valore della resistenza di sense mediante l’uso di un multiplexer analogico, implementato con un ADG411, basandosi sulla corrente misurata. In questo modo sarà possibile avere una misura della corrente utilizzando diverse resistenze di sense per la corrente e il tutto verrà gestito in maniera automatica dall’Arduino in fase di misura.
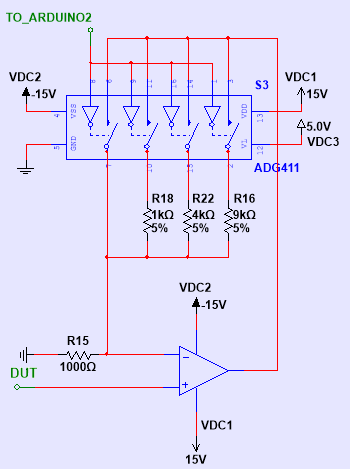
3.4 Amplificatore di tensione
Per poter ridurre al massimo il rapporto segnale rumore delle misure di tensione e corrente del DUT si è pensato di amplificare il segnale di tensione in ingresso all’ADC e per fare ciò si è utilizzato un amplificatore di tensione non invertente e il circuito viene mostrato in figura 3.5 che presenta un guadagno regolabile in modo digitale mediante l’uso di un ADG411. Questo circuito è in grado di amplificare il segnale in ingresso di un fattore pari a uno, due, cinque o dieci. Il segnale di ingresso viene opportunamente amplificato in modo tale che venga coperto l’intero range di misura del convertitore analogico digitale adibito alla conversione della misura.
3.5 Modulatore in quadratura
Per l’intervallo di frequenze in cui deve operare il dispositivo non è necessaria una larghezza di banda così molto ampia si è quindi scelto di usare l’AD633 della Analog Devices per poter sviluppare il modulatore in quadratura che ha il compito di ricavare il modulo e la fase del DUT, il circuito è mostrato in figura 3.6.
Le sue principali caratteristiche sono la sua capacità di ricevere segnali con escursioni di dieci volt picco-picco in modo differenziale, il costo e una banda di uscita di 1MHz.
La funzione che tale dispositivo realizza in uscita è:

In questo caso X2 e Y2 vengono collegati a massa mentre il segnale Z viene usato per introdurre un offset al segnale di uscita in modo da renderlo completamente positivo e completamente compatibile con il convertitore analogico digitale interno all’Arduino. A valle del moltiplicatore analogico è presente un filtro passa basso con una frequenza di taglio di circa seicento Hertz e questo ha il compito di estrapolare la componente continua del segnale dato che essa è proporzionale al valore del modulo e della fase del DUT che si vuole misurare.
3.6 Operazioni eseguite dall’arduino
Il circuito completo usato per il condizionamento dei segnali è mostrato in figura 3.7 e le operazioni che il microcontrollore deve eseguire per effettuare le misura sono le seguenti:
- Imposta il valore del phase register dei due DDS a zero in modo tale che i segnali risultino in fase.
- Si attende che le uscite dei due filtri a valle dell’intero circuito si portino a regime.
- Si eseguono cento misure con l’ADC del microcontrollore per avere una misura della tensione ai capi del DUT
- Si imposta l’ADG411 in modo tale da avere la misura della corrente andando a misurare la tensione ai capi della resistenza di sense in serie al DUT.
- Il microcontrollore imposta la fase del secondo DDS a novanta gradi in modo tale che i segnali siano in quadratura
- Nuovamente si attende che le uscite dei due filtri si riportino a regime.
- Si eseguono cento misure con l’ADC del microcontrollore per avere una misura della corrente ai capi del DUT.
Questa soluzione presenta molti punti a suo favore, infatti il possibile ritardo che si potrebbe verificare a causa dei circuiti di condizionamento si presenta sia sulla misura di tensione che su quella di corrente e in questo modo può essere compensata una volta acquisite le misure. Inoltre il fatto di riportare l’informazione che riguarda il modulo e la fase del DUT in continua permette l’uso anche di ADC lenti e quindi meno costosi. Infine la presenza di rumore nel circuito non provoca grossi problemi poiché il segnale viene traslato in continua ed è presente un filtro passa basso che va a ridurre il rumore sulle misure.