

 The aim of the project is to build a virtual piano by programming a DSP.
In the figure we can see the general outline of the project: the user moves the source S along the "virtual" piano;
source S emits a sound that is received by microphones 1 and 2;
then the DSP device, comparing the signals 1 and 2, determines the position of
S on the keyboard and produces a note of the desired frequency.
The aim of the project is to build a virtual piano by programming a DSP.
In the figure we can see the general outline of the project: the user moves the source S along the "virtual" piano;
source S emits a sound that is received by microphones 1 and 2;
then the DSP device, comparing the signals 1 and 2, determines the position of
S on the keyboard and produces a note of the desired frequency.
Therefore, th steps to follow for the construction are:
The physical dynamics, according to the available tools, is based on the delay between the sounds received by
microphone 1 and microphone 2. This delay may unfortunately be influenced by several factors: frequency, noise,
sampling rate, distance between microphone and source. To simplify the work we use as source
a 2 kHz frequency sine wave.
Of course this sounds belongs to the range of audible frequencies by human ears (20H ~ 20KHz).
Anyway it is not necessary, as will be explained later, that the source intensity is elevate, so it does not create any
confusion with the sounds produced by the DSP device and we will not have any ear disturbs.
The distances between the instruments, in particular between the two microphones and the source, have some limitations caused by the detection of
delay: in fact the two microphones cannot be neither too close nor too far from the source, and not too distant
between them. In particular, the distance between the source and the microphones cannot exceed a wavelength away:
in fact, in this way you ensure that the phase detected by the device will be inside a certain range, corresponding to a wavelength,
in our case about 17/18 cm (speed of sound divided by frequency). With these measures, distance between microphones is 16 cm and 10 cm of orthogonality
with the source. So the sound will be detected by microphones, which send the signal to the DSP: the basic principle of the project is, in fact, calculate the delay
between the two signals and associate a note to a small range of values for the delay. For example, in our case we determined that the measure of each note is 2 cm, from the 440 Hz A
completing to the next G, while the microphones are 1 cm far from the sides of the keyboard. If you put the source exactly halfway between the two microphones, the delay will be almost nil and the note established is D.

TMS320C6713 DSP from Texas Instruments is the basic device signal processing. The device has numerous tutorials on the Internet, available in the downloads section.
To realize this type of project we use the audio input and output: input is for receiving signals
by the two microphones, while the output is used to generate the desired sound according to the position of the source. This device is equipped with a single stereo audio input, so a first problem starts because
the two microphones transmit a mono signal: to repair this problem we built a simple little device that receives the two signals from the microphones and convert them into a left / right stereo.
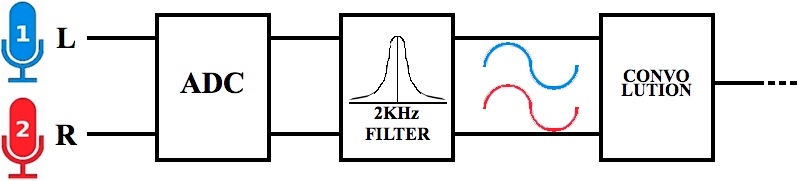
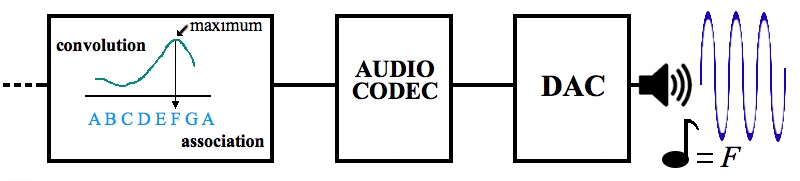
The diagram shows the behavior of the two signals inside the DSP: first, the two signals are converted to digital signals and they are filtered to obtain cleaner samples. The next step is convolution, in which
we can associate its maximum with the phase difference between left and right signal. This point represents the mathematical core of the project. Now we can associate small range of values
to the corresponding note we want. Then the DSP responds with real-time issuance of a note according to the signals delay received from two microphones;
of course the two last steps are the audio codec elaboration and the digital to analog convertion.
In this section we show some examples of real-time measurements made by the DSP; the videos show the last evolution of the virtual player piano. Here are some graphical examples of detection at different performance stages:





This videos show the last evolution of the Virtual Piano:
Development problems:
The first problem during the development was a wrong idea about the source frequency: initially the source frequency was 100 Hz because we thought that this frequency is too low to hear.
Anyway 100 Hz is too sensitive and there were a lot of disturbs (expecially caused by 50 Hz electric network frequency) and filters were not able to confine these disturbs.
So we passed to a project with 150 Hz and after that to 200 Hz and even 1Khz. But all these projects were not so good as a source frequency 2 Khz project.
The final choice of source frequency limits the virtual piano's dimentions to a keyboard of 16 x 10 cm (almost near to real dimentions of 7 notes on a piano):
first projects, in fact, had huge distances of meters and that was a logistic problem.
The last but not the least problem was the place of research: the University laboratory temperature influenced the sound velocity, also electronic devices inside the laboratory may have influenced the results.
But, in general, it works!
The basic tools needed for the realization of the project are:



/***********************************************************************
Virtual_Piano.c
***********************************************************************/
void detect_delay(short *vectro_1, short *vector_2)
{
int convolution[40];
int x[130];
int y[130];
int k = 0, t = 0, max = 0, index_max = 0;
DSK6713_LED_on(0);
//init convolution:
for ( k = 0; k < 40; k++ )
convolution[k]=0;
//20 zeros before and after vector 1
for ( k = 0; k < 20; k++)
x[k] = 0;
for ( k = 20; k < 110; k++)//catching values from 100 index
x[k] = vector_1[k-20];
for ( k = 110; k < 130; k++)
x[k] = 0;
//move vector 2 to 20 early positions and shift 1 bit to 1 bit
for ( k = 0; k < 90; k++)
y[k] = vector_2[k];
for ( k = 90; k < 130; k++)
y[k] = 0;
for ( k = 0; k < 40; k++)// 40 y vector movements
{
for ( t = 0; t < 130; t++)
convolution[k] = convolution[k] + x[t]*y[t];
shift_right(y);// right shift of the vector
}
for ( m = 0; m < 40; m++)
{
if( convolution[m] >= max )
{ max = convolution[m];
index_max = m;
}
}
tone = index_max;
if( tone > 0 && tone < 7)
freq = 440; //A
else if ( tone >= 7 && tone < 11)
freq = 494; //B
else if ( tone >= 11 && tone < 17)
freq = 523; //C
else if ( tone >= 17 && tone < 21)
freq = 587; //D
else if ( tone >= 21 && tone < 28)
freq = 659; //E
else if ( tone >= 28 && tone < 33)
freq = 698; //F
else if ( tone >= 33 && tone < 38)
freq = 784; //G/*
else freq = 400; //if freq = 400, audio will be turned off
new_tone = freq;
if ( new_tone != old_tone) // control: passing to the next tone after 4 counts
{
tn++;
if ( ts >= 3)
{
tn=0;
old_tone = new_tone;
}
}
else
tn = 0;
freq = old_tone;
coef = PI*freq/48000;
DSK6713_LED_off(0);
}