R.O.V. Team Uniud
The following circuit has been used to drive the engines.
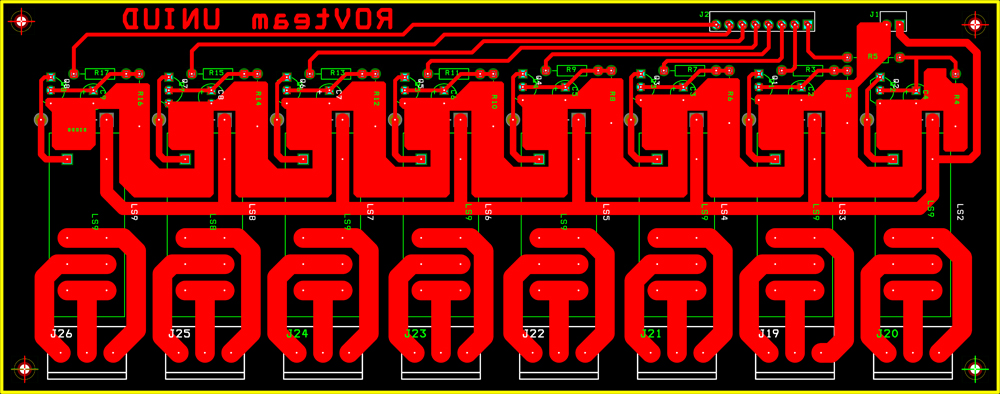
Bi-directional movements are necessary, so 2 relays are needed to drive a single engine.
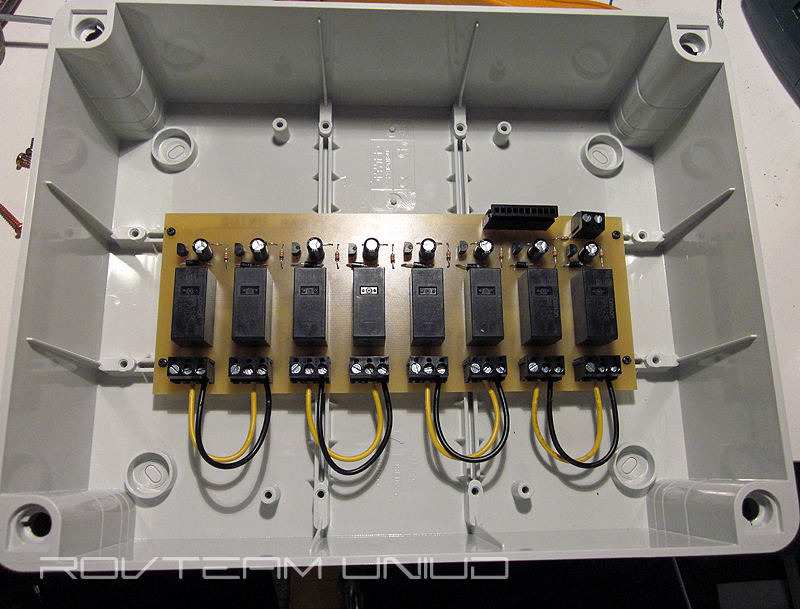
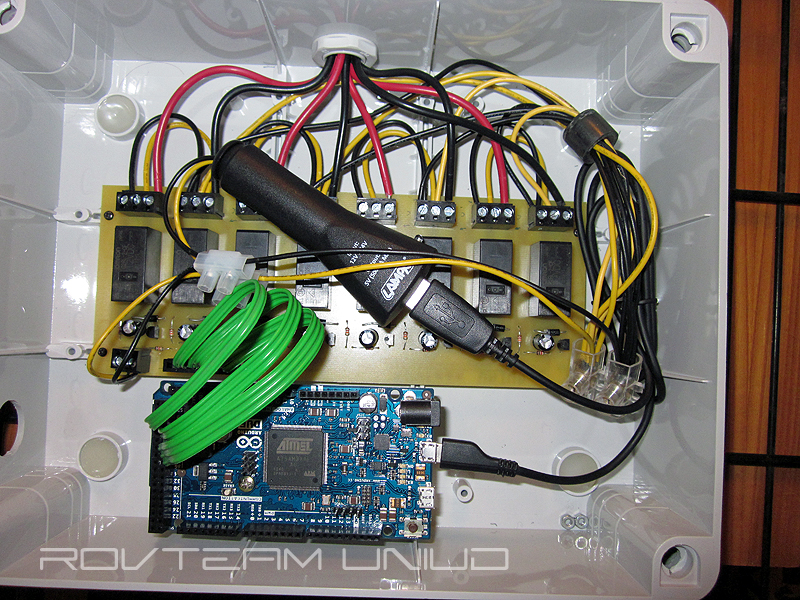
The layout has been designed with OrCad Layout tool. The following photos show the layout and the actual implementation.

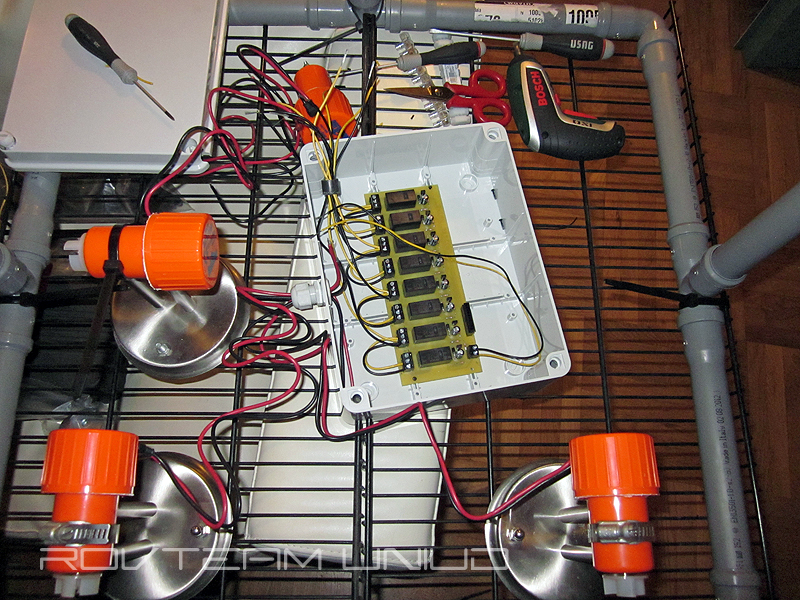
The driving network is fixed in the electrical box along with a RaspberryPi or Arduino microcontroller.
The circuit and the engines have been electrically tested in water working situation and 7 A is the maximum current measured (per engine).
The whole system needs to be alimented, and an external communication is needed as well. To this aim, 15 meters ethernet cable along with two 15 meters couples of 5 mm2 electrical cable are used. The electrical box has to be drilled and sealed properly, in order to let the cable in and keep the water out.
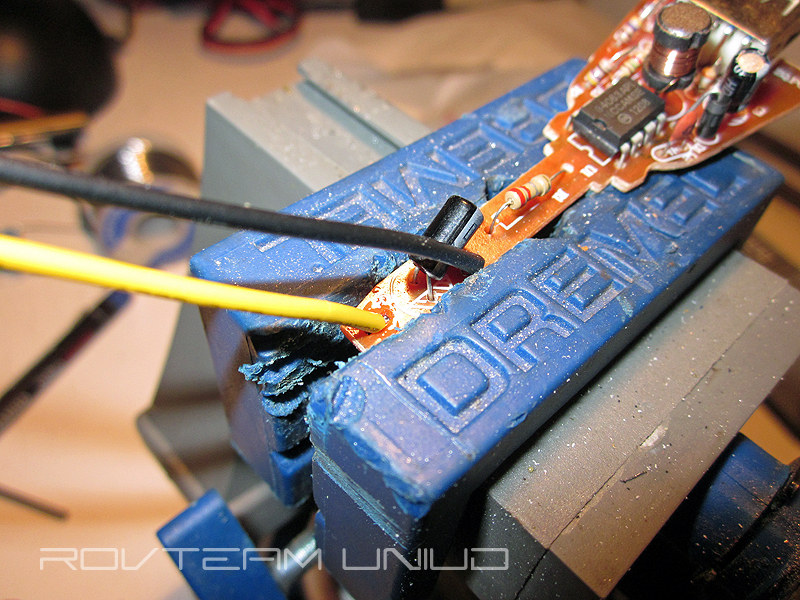
The following car lighter has been used to convert the 12 V power input to the 5 V needed by the microcontroller-board.

© Colonna S. - Cheng Hivai R. - Cossettini A. - Rollo T. - Locatelli A. - Scarsini M. - Università degli Studi di Udine - a.a. 2012/2013